Conversion of a robotic base running on PIC16F84 μcontroleur
Original website project: Area RC-bot
The monty is a robot built with a subscription to a collection of booklets F & G.
It is versatile because he knows alone, follow a line, follow a beam of light, avoid obstacles, play sounds, grasp objects, react to a sound pulse …
It consists of a plastic frame receiving motors, batteries and cards like the control board, power board and card ultrasonic detection.
It also has a body on which are mounted the final elements such as map light detection in the head or clip attached to the end of one arm.
The “brain” of the robot is based on the traditional PIC microcontroller 16f84.
Advantages: versatile and didactic, perfect for learning assembly programming. Documentations that were supplied with the robot are very clear and the explanations contained therein.
Disadvantages: fairly well designed for my taste, it requires two separate (very disadvantageous because there is always a battery is discharged at the wrong time) batteries. All devices can’t be connected at the same time because there are not enough entries. And it is horribly slow when traveling.

Board control / command:

It is on what she implemented the microcontroller with its oscillator (4Mhz), it allows programming Pic 16f84 through a parallel connection to a computer. It also includes the regulators who set two stable supply voltage (5V and 13.8V). There is also the Picbus (HE-10 connector) that will connect the power board.
This card will be replaced by an Arduino with a board of rapid prototyping.
Power board:

It allows sensors interfacing with the microcontroller, the power to the motors that allow rotation in one direction or the other of each of them. It also allows control of the speaker.
This board will not change for now
Board ultrasonic and sound detection:
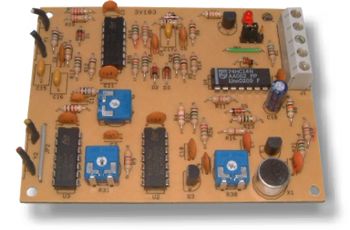
It measures a distance threshold with respect to the robot system due to its ultrasonic sensor. The reference information in all or nothing, it is impossible to measure any distance and use it in a program, all that can be known is the presence or absence of objects at a distance less than or equal to an adjustable threshold.
It is also equipped with a microphone, which lets you create, for example, an acoustic switch so that the robot starts from an acoustic signal (clapping in hands, whistle …)
Project Code:
Test module: clamp
Test module: Obstacle detection and noise detection
Test module: Detection brightness

Recent Comments