Purpose:
This project was created to make a robot that can keep a home.
I. Equipment used:
- PC
- Raspberry Pi
- Robotic Base
- Arduino
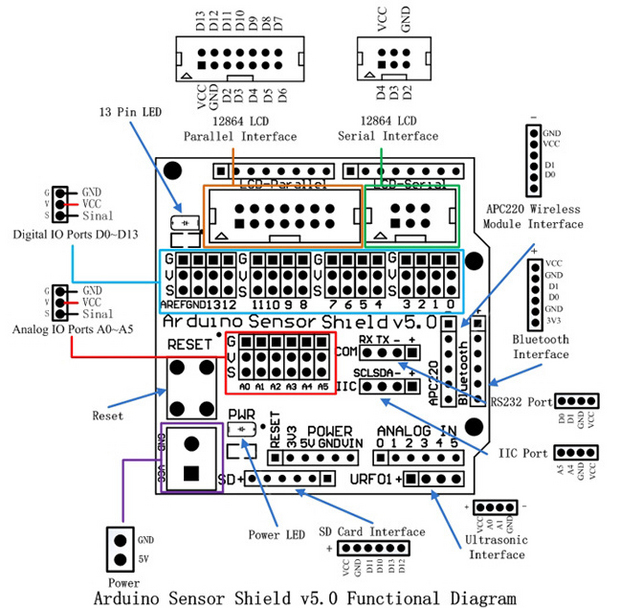
- Arduino SensorShield V5.0
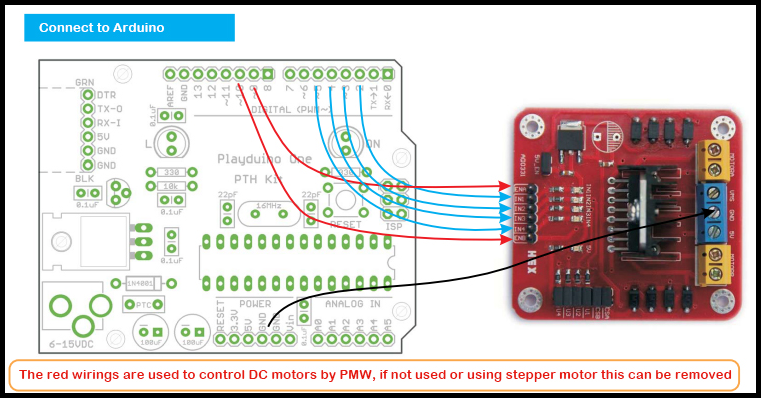
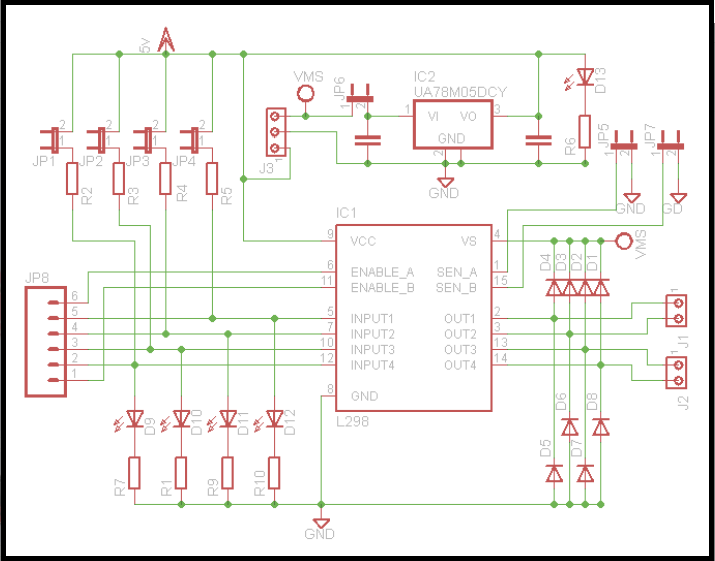
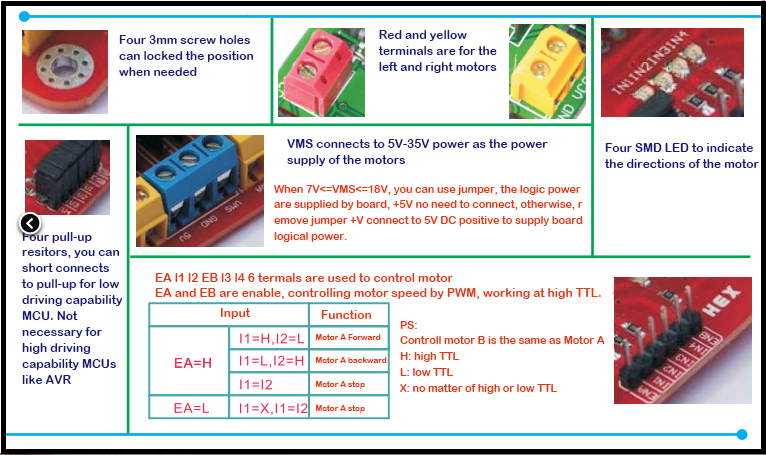
- L298 Power Interface
- 4-wheels independent drive
II. Software used:
- Arduino
- Processing
- OS Raspbian
- Putty
- UltraVNC viewer
III. Libraries used:
IV. Functions:
1.Function Sonar
Purpose :
The robot can interact with his environment.
Follow-up:
Version 1:
- Connecting and grip Sonar.
- Using the programme found on the web to make a sonar interfaced with the serial port.
- Viewing on the PC with the software Processing.
Source Code:
Source code with the Arduino and Processing scripts
Library for Sonar
2.Function IR Remote
Purpose :
Allow to choose a predefined function of the robot or drive directly.
Follow-up:
Version 1 :
- Connecting and grip IR module.
- Using the programme found on the web to make a sonar interfaced with the serial port.
- Correlation between the transmitted code and the action button.
Video test of the IR module:
Link to the video: Project VOIDog IR Module
3.Fonction mobility
Purpose :
Move the robot
Follow-up:
Version 1:
- Connecting and grip the L298 module.
- Coding function forward, backward, turn right, turn left and return to the serial port.
4.Function Bluetooth
Purpose :
control the robot remotely
Follow-up:
Version 1:
- Connecting and grip the Bluetooth module.
- Configuring the connection to the PC.
- Using the mobility function to see if the communication works
Video test of the Bluetooth module
Link to the video: Project VOIDog Bluetooth module
Version 2
Connection with the Raspberry Pi
o Install the Bluetooth key on Raspberry
In the Raspberry terminal type the following line:
sudo apt-get install bluetooth bluez-utils blueman
5. Webcam Function
Purpose :
Enable the user to see what the robot sees
Follow-up :
Version 1
o Test connection webcam on Raspberry Pi.
Currently, webcam function is in progress. A problem of interfacing between the webcam and the raspberry pi blocks the search.
Webcam Labtec 1200 isnot support by rapsberry.
V. Synthesis:
Purpose :
The robot assembled all the features to make it completely autonomous or controlled directly or remotely by the user
Follow-up :
Version 1
o The robot can be controlled directly via the IR remote control (Forward, backward, turn left, turn right).
o The robot via the selection of the program “2″ on the remote control is able to be controlled via a serial connection (wired or Bluetooth).
VI. Annexes:
Power Architecture of Project
Components Datasheets
Arduino SensorShield V5.0
L298 Interface



Recent Comments