But:
Ce projet a été créé à des fins de recherche visant à rendre un véhicule totalement autonome.
Dans un premier temps, le travail s’effectuera sur un modèle réduit.
Le modèle réduit choisi est un modèle se rapprochant le plus d’une architecture de véhicule classique. (moteur et différentiel à l’avant).
Pour cette approche, seule la validation des lois de commande rendant autonome du véhicule est recherchée.
Matériel utilisé:
- Voiture radiocommandée
- Servomoteur pour la direction
- Servomoteur pour le contrôle de vitesse (par la suite c=sera remplacé par LM298)
- Batterie 12V 1300mAh
- moteur et transmission à l’avant
- Arduino Uno
- Radar
- Servomoteur Sanwa
- Capteur Ultrason HC-RS04 Documentation: HC-SR04 – HCSR04
Suivi:
Tous les codes source sont en Annexes. Vous pouvez aussi visiter la page tutoriels afin de trouver les explications ainsi que les bouts de code nécessaire à faire marcher les sous-fonctions.
Version 1:
Création du projet interfaçage du modèle réduit avec l’arduino.Implémentation des fonctions marche avant, marche arrière, gauche et droite en tout ou rien. Création d’une carte d’entrées/sorties pour l’arduino.
Version 2:
Amélioration des fonctions marche avant, marche arrière, gauche et droite afin de rendre le comportement du véhicule plus progressif.
Version 3:
Implantation d’une lecture d’une commande de la position des servomoteurs envoyé à l’arduino via port série. (Petite révolution ^^). Par exemple, on peut envoyer directement Av120 –> l’arduino interprétera –> mettre le servomoteur gérant la vitesse véhicule sur l’angle 120°. Tutoriel permettant de recevoir une chaine de caractères
Version 4 et 5:
Modification du châssis afin d’implémenter une fonction radar.
Version 6:
Abandon provisoire de la commande directe via port série. Intégration d’une fonction radar permettant à RCVoid d’éviter de se cogner dans les murs (lorsque son utilisateur n’est pas assez rapide pour le stopper manuellement).
ANNEXES:
Codes source:
Version 1:
Version 2:
Version 3:
Version 4 et 5:
Seules des modifications châssis ont été effectuées en vue de l’implantation d’un radar.
Version 6:
Librairie pour utiliser le module radar (plus précise que celle de VOIDog mais plus lente en absence d’objet).
Schémas electrique:
Brochage des servomoteurs en fonction des marques.

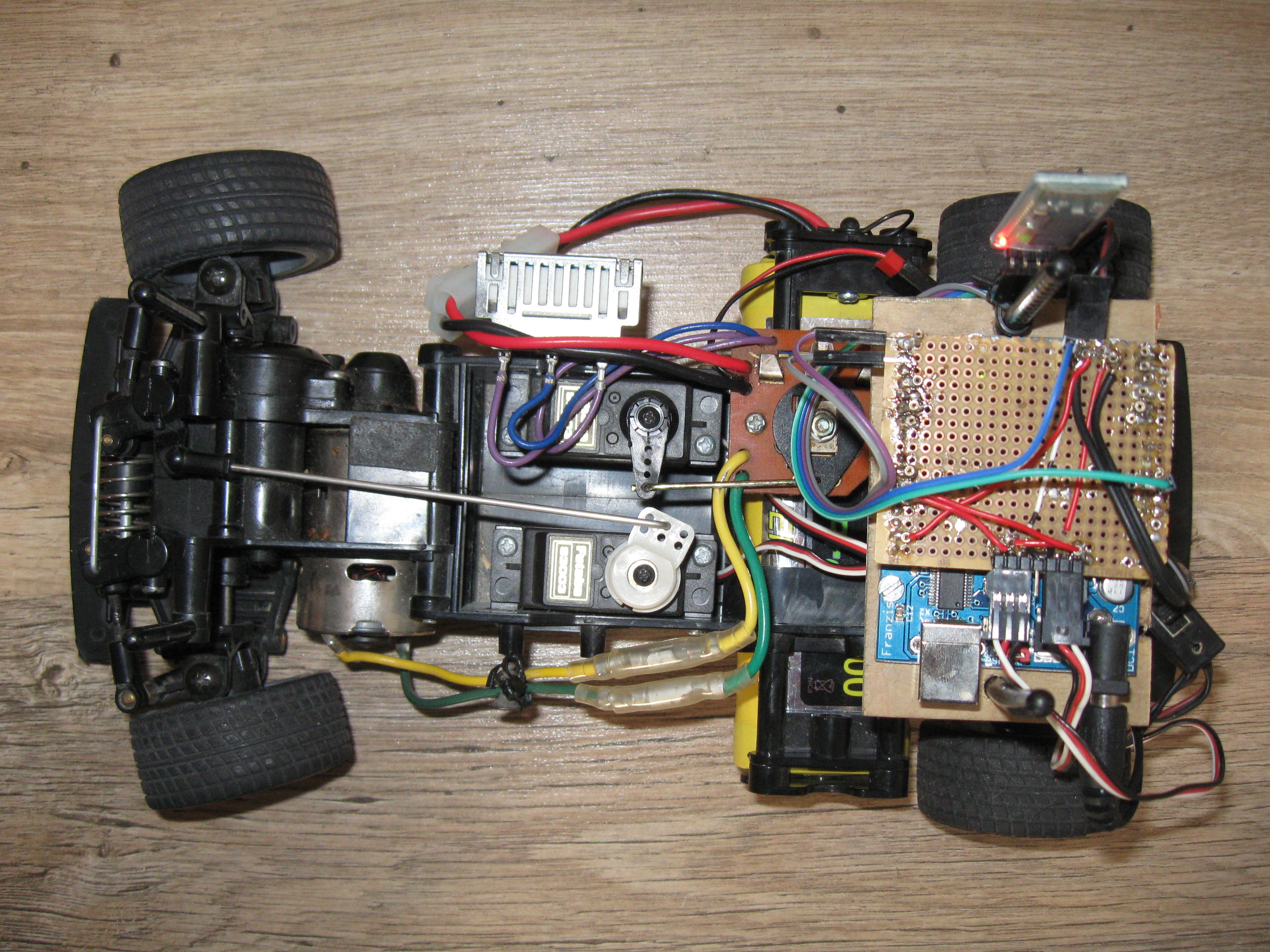
Photographies:
RCVoid (Version 1 à 3)

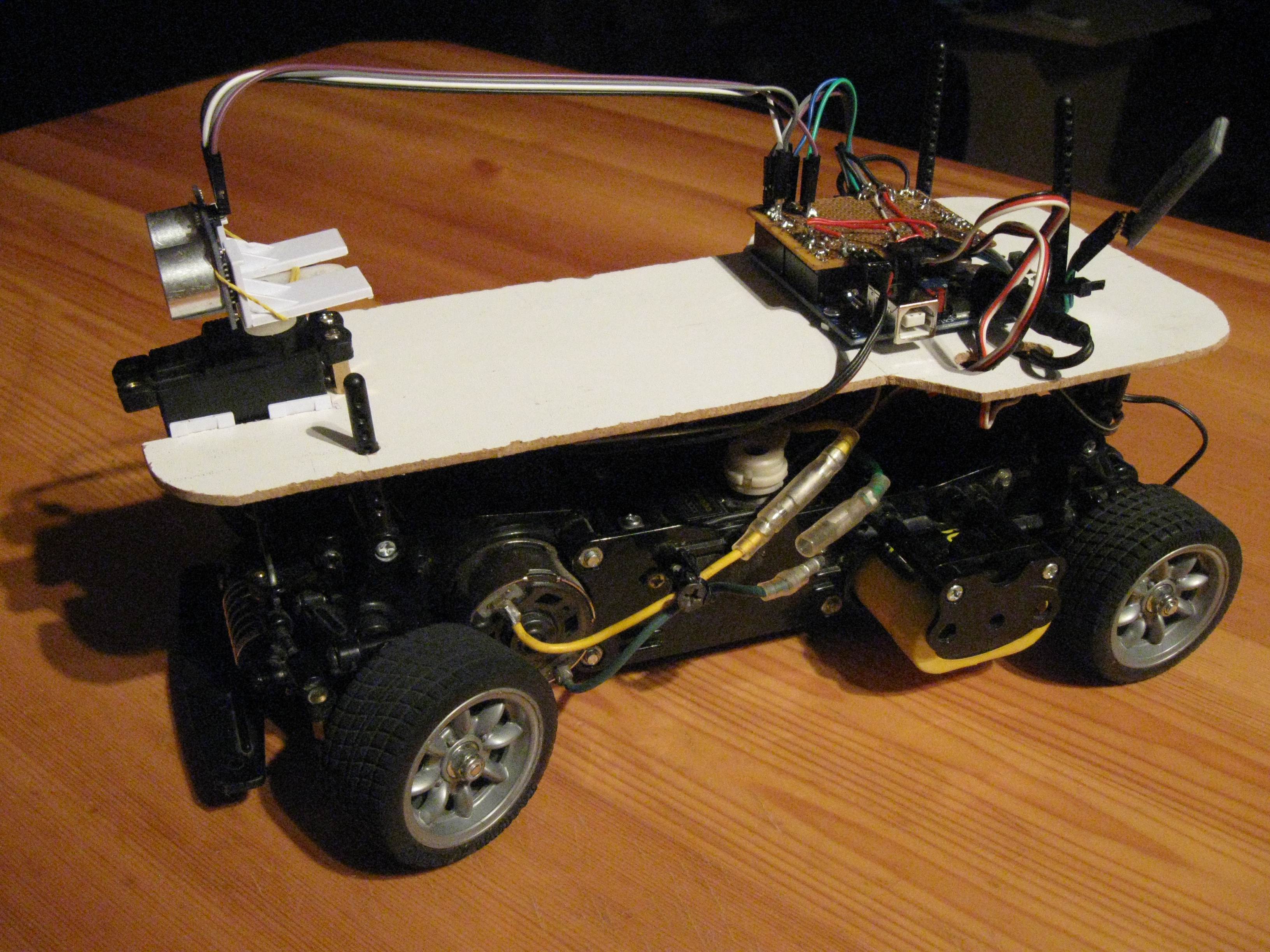
RCVoid (Version 4 à 6)

Vidéos:
Le premier test est un contrôle du projet grâce à un PC et via le Bluetooth.
Lien vers la vidéo des premiers tours de roue de RCVoid: RCVoid 1er Test

Recent Comments